




机器人-卡扣装配


详情
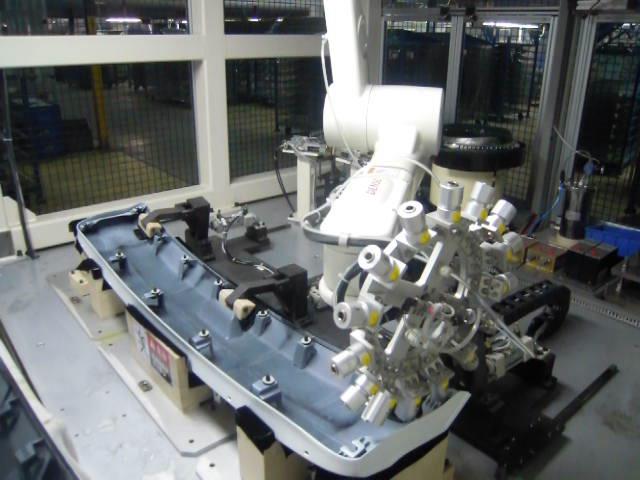
配合六轴机器人(正/ 倒装)以实现高度柔性自动化装配+ 涂胶
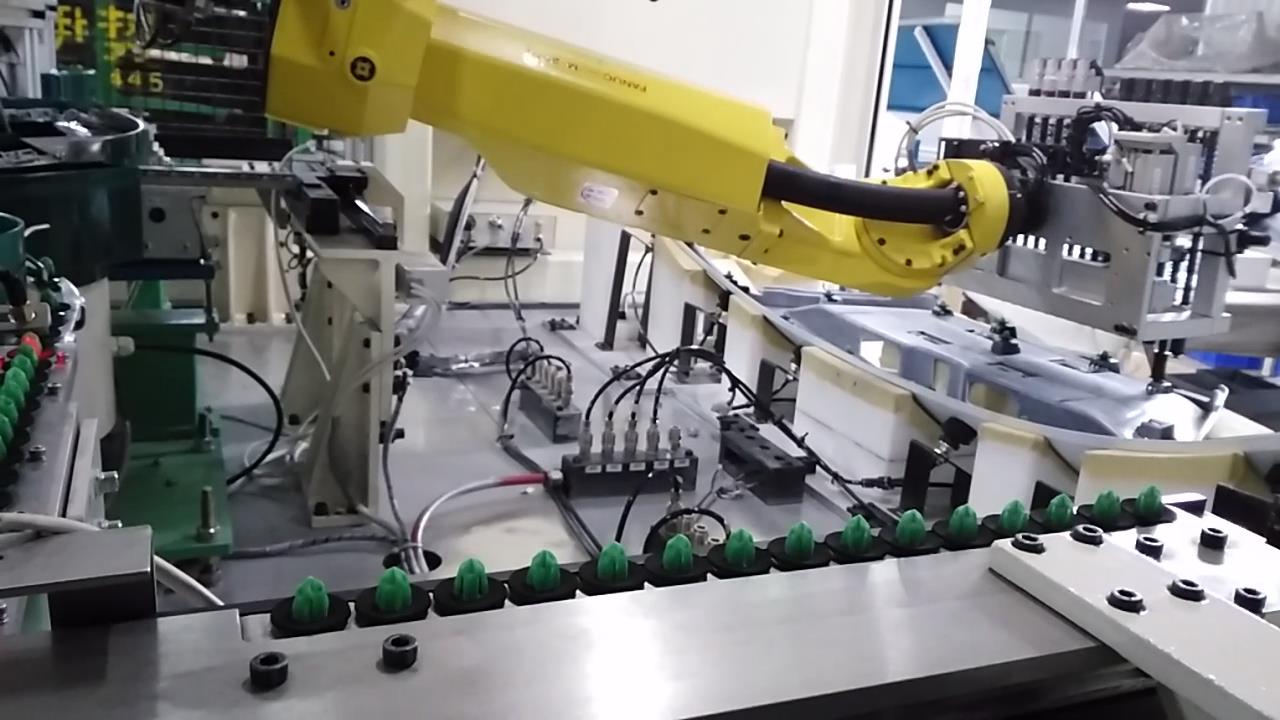
振动盘自动筛选来料,可通过伺服多料传送以同步拾取
转盘式气爪拾取及装配结构设计,提高机器人装配效率
底模分段及夹紧设计,确保产品位置一致性,保障装配合格率
左右伺服驱动双工位设计,机器人动作零等待时间
可配置CCD 视觉系统,实时侦测检查卡扣漏装、位置度
发表评论


产品分类
联系方式:027-8449 2117
| 联系人: | 徐先生 |
|---|---|
| 电话: | 13098833027 |
| 传真: | 027-8449 2117 |
| 地址: | 武汉市经济技术开发区枫树五路上元量子产业园11栋 |
